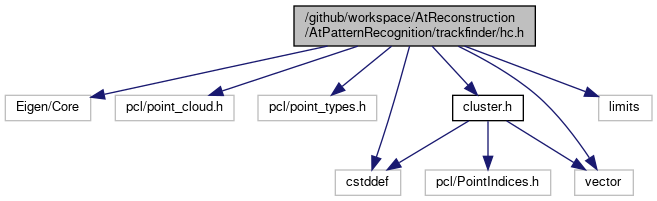
#include <Eigen/Core>
#include <pcl/point_cloud.h>
#include <pcl/point_types.h>
#include "cluster.h"
#include <cstddef>
#include <limits>
#include <vector>
Go to the source code of this file.
|
| typedef std::vector< size_t > | hc::cluster |
| |
| typedef float(* | hc::ClusterMetric) (cluster const &lhs, cluster const &rhs, Eigen::MatrixXf const &d, pcl::PointCloud< pcl::PointXYZI >::ConstPtr cloud) |
| |
|
| float | hc::singleLinkClusterMetric (cluster const &lhs, cluster const &rhs, Eigen::MatrixXf const &d, pcl::PointCloud< pcl::PointXYZI >::ConstPtr cloud) |
| |
| float | hc::completeLinkClusterMetric (cluster const &lhs, cluster const &rhs, Eigen::MatrixXf const &d, pcl::PointCloud< pcl::PointXYZI >::ConstPtr cloud) |
| |
| std::vector< triplet > | hc::generateTriplets (pcl::PointCloud< pcl::PointXYZI >::ConstPtr cloud, size_t k, size_t n, float a) |
| |
| cluster_group | hc::cleanupClusterGroup (cluster_group const &clusterGroup, size_t m) |
| |
| Cluster | hc::toCluster (std::vector< hc::triplet > const &triplets, hc::cluster_group const &clusterGroup, size_t pointIndexCount) |
| |
| cluster_group | hc::compute_hc (pcl::PointCloud< pcl::PointXYZI >::ConstPtr cloud, std::vector< triplet > const &triplets, ScaleTripletMetric triplet_metric, float t, int opt_verbose) |
| |