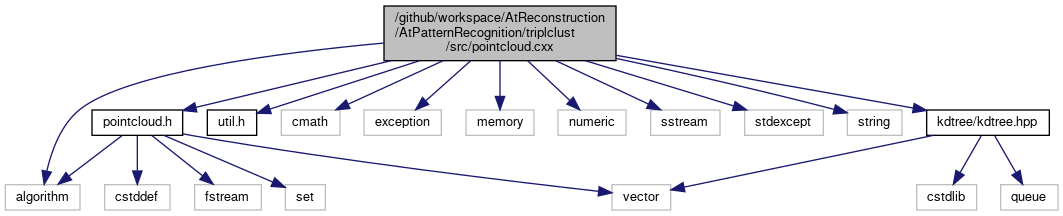
#include "pointcloud.h"#include "util.h"#include <algorithm>#include <cmath>#include <exception>#include <memory>#include <numeric>#include <sstream>#include <stdexcept>#include <string>#include "kdtree/kdtree.hpp"
Include dependency graph for pointcloud.cxx:
Go to the source code of this file.
Functions | |
| std::ostream & | operator<< (std::ostream &strm, const Point &p) |
| Point | operator* (Point x, double c) |
| Point | operator* (double c, Point x) |
| void | split (const std::string &input, std::vector< std::string > &result, const char delimiter) |
| void | load_csv_file (const char *fname, PointCloud &cloud, const char delimiter, size_t skip) |
| void | smoothen_cloud (const PointCloud &cloud, PointCloud &result_cloud, double r) |
Function Documentation
◆ load_csv_file()
| void load_csv_file | ( | const char * | fname, |
| PointCloud & | cloud, | ||
| const char | delimiter, | ||
| size_t | skip | ||
| ) |
Definition at line 183 of file pointcloud.cxx.
◆ operator*() [1/2]
Definition at line 142 of file pointcloud.cxx.
◆ operator*() [2/2]
Definition at line 137 of file pointcloud.cxx.
◆ operator<<()
| std::ostream& operator<< | ( | std::ostream & | strm, |
| const Point & | p | ||
| ) |
Definition at line 99 of file pointcloud.cxx.
◆ smoothen_cloud()
| void smoothen_cloud | ( | const PointCloud & | cloud, |
| PointCloud & | result_cloud, | ||
| double | r | ||
| ) |
Definition at line 254 of file pointcloud.cxx.
◆ split()
| void split | ( | const std::string & | input, |
| std::vector< std::string > & | result, | ||
| const char | delimiter | ||
| ) |
Definition at line 165 of file pointcloud.cxx.
