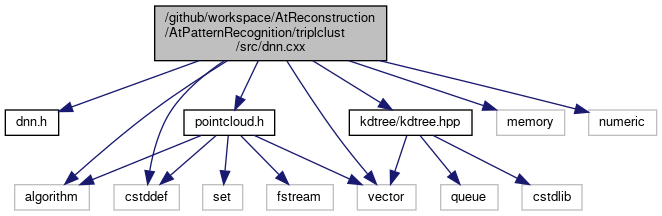
#include "dnn.h"#include "pointcloud.h"#include <algorithm>#include <cstddef>#include <memory>#include <numeric>#include <vector>#include "kdtree/kdtree.hpp"
Include dependency graph for dnn.cxx:
Go to the source code of this file.
Functions | |
| void | compute_mean_square_distance (const PointCloud &cloud, std::vector< double > &msd, int k) |
| double | first_quartile (const PointCloud &cloud) |
Function Documentation
◆ compute_mean_square_distance()
| void compute_mean_square_distance | ( | const PointCloud & | cloud, |
| std::vector< double > & | msd, | ||
| int | k | ||
| ) |
◆ first_quartile()
| double first_quartile | ( | const PointCloud & | cloud | ) |
