#include <kdtree.hpp>
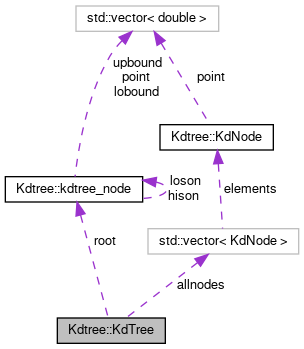
Collaboration diagram for Kdtree::KdTree:
Public Member Functions | |
| KdTree (const KdNodeVector *nodes, int distance_type=2) | |
| ~KdTree () | |
| void | set_distance (int distance_type, const DoubleVector *weights=NULL) |
| void | k_nearest_neighbors (const CoordPoint &point, size_t k, KdNodeVector *result, std::vector< double > *distances, KdNodePredicate *pred=NULL) |
| void | range_nearest_neighbors (const CoordPoint &point, double r, KdNodeVector *result) |
Public Attributes | |
| KdNodeVector | allnodes |
| size_t | dimension |
| kdtree_node * | root |
Detailed Description
Definition at line 68 of file kdtree.hpp.
Constructor & Destructor Documentation
◆ KdTree()
| Kdtree::KdTree::KdTree | ( | const KdNodeVector * | nodes, |
| int | distance_type = 2 |
||
| ) |
Definition at line 204 of file kdtree.cxx.
◆ ~KdTree()
| Kdtree::KdTree::~KdTree | ( | ) |
Definition at line 197 of file kdtree.cxx.
Member Function Documentation
◆ k_nearest_neighbors()
| void Kdtree::KdTree::k_nearest_neighbors | ( | const CoordPoint & | point, |
| size_t | k, | ||
| KdNodeVector * | result, | ||
| std::vector< double > * | distances, | ||
| KdNodePredicate * | pred = NULL |
||
| ) |
Definition at line 295 of file kdtree.cxx.
◆ range_nearest_neighbors()
| void Kdtree::KdTree::range_nearest_neighbors | ( | const CoordPoint & | point, |
| double | r, | ||
| KdNodeVector * | result | ||
| ) |
Definition at line 351 of file kdtree.cxx.
◆ set_distance()
| void Kdtree::KdTree::set_distance | ( | int | distance_type, |
| const DoubleVector * | weights = NULL |
||
| ) |
Definition at line 232 of file kdtree.cxx.
Member Data Documentation
◆ allnodes
| KdNodeVector Kdtree::KdTree::allnodes |
Definition at line 89 of file kdtree.hpp.
◆ dimension
| size_t Kdtree::KdTree::dimension |
Definition at line 90 of file kdtree.hpp.
◆ root
| kdtree_node* Kdtree::KdTree::root |
Definition at line 91 of file kdtree.hpp.
The documentation for this class was generated from the following files:
- /github/workspace/AtReconstruction/AtPatternRecognition/triplclust/src/kdtree/kdtree.hpp
- /github/workspace/AtReconstruction/AtPatternRecognition/triplclust/src/kdtree/kdtree.cxx
